terminal.py
ADVANCED COURSE
코드로 로봇의 눈을 뜨게 하다Code the Vision, Master the AI
상상을 현실로 구현하는 엔지니어링의 시작, Advanced Course
블록을 넘어 실제 개발 언어(Python/C++)로. AI 비전과 자율주행 기술을 통해
스스로 생각하고 판단하는 로봇을 설계합니다.
상상을 현실로 구현하는 엔지니어링의 시작, Advanced Course
블록을 넘어 실제 개발 언어(Python/C++)로. AI 비전과 자율주행 기술을 통해
스스로 생각하고 판단하는 로봇을 설계합니다.
Advanced Course는 로봇에게 단순히 명령을 내리는 것을 넘어, 로봇이 세상을 '보고(See)' 데이터를 '해석(Think)'하여 스스로 '행동(Act)'하게 만드는 심화 과정입니다. 현업 개발자들이 사용하는 툴과 언어를 미리 경험하며 미래의 AI 엔지니어로서의 역량을 키웁니다.
현업 개발자 수준의 기술을 단계별로 마스터합니다
드래그 앤 드롭을 졸업하고, 텍스트 코딩의 세계로 진입합니다. 데이터 처리와 알고리즘 구현에 최적화된 Python과 하드웨어 제어의 핵심인 C++를 통해 정교한 로봇 제어 능력을 습득합니다.
# Python Example
import numpy as np
import cv2
class RobotController:
def __init__(self):
self.speed = 0.5
def process_sensor(self, data):
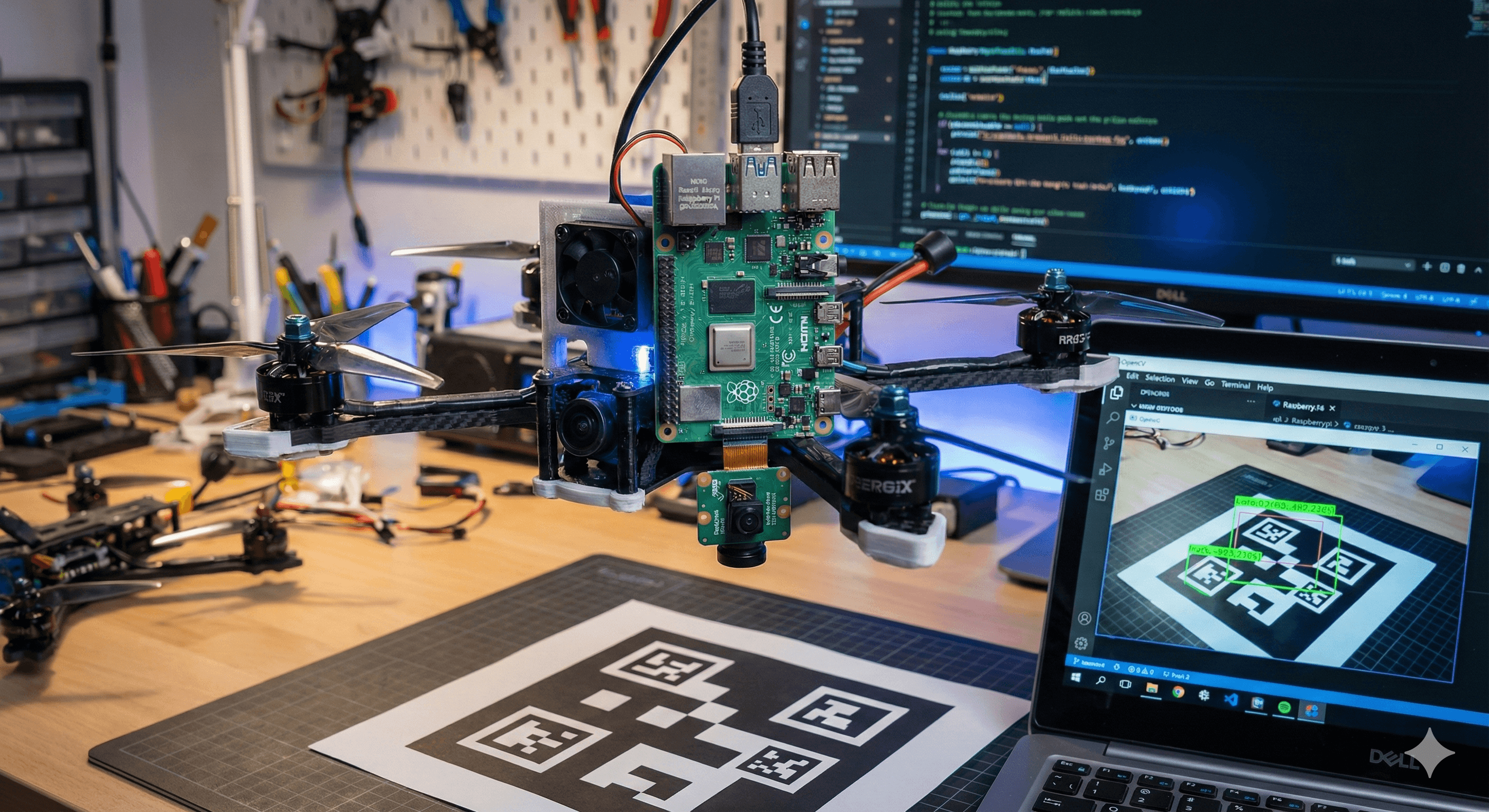
return np.mean(data)카메라를 통해 들어온 시각 정보를 분석합니다. 사물 인식(Object Detection), 얼굴 인식, 색상 추적 등 AI 모델링을 통해 로봇이 주변 환경을 이해하고 데이터를 학습하는 과정을 실습합니다.
# Computer Vision
import cv2
def detect_object(frame):
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
edges = cv2.Canny(gray, 50, 150)
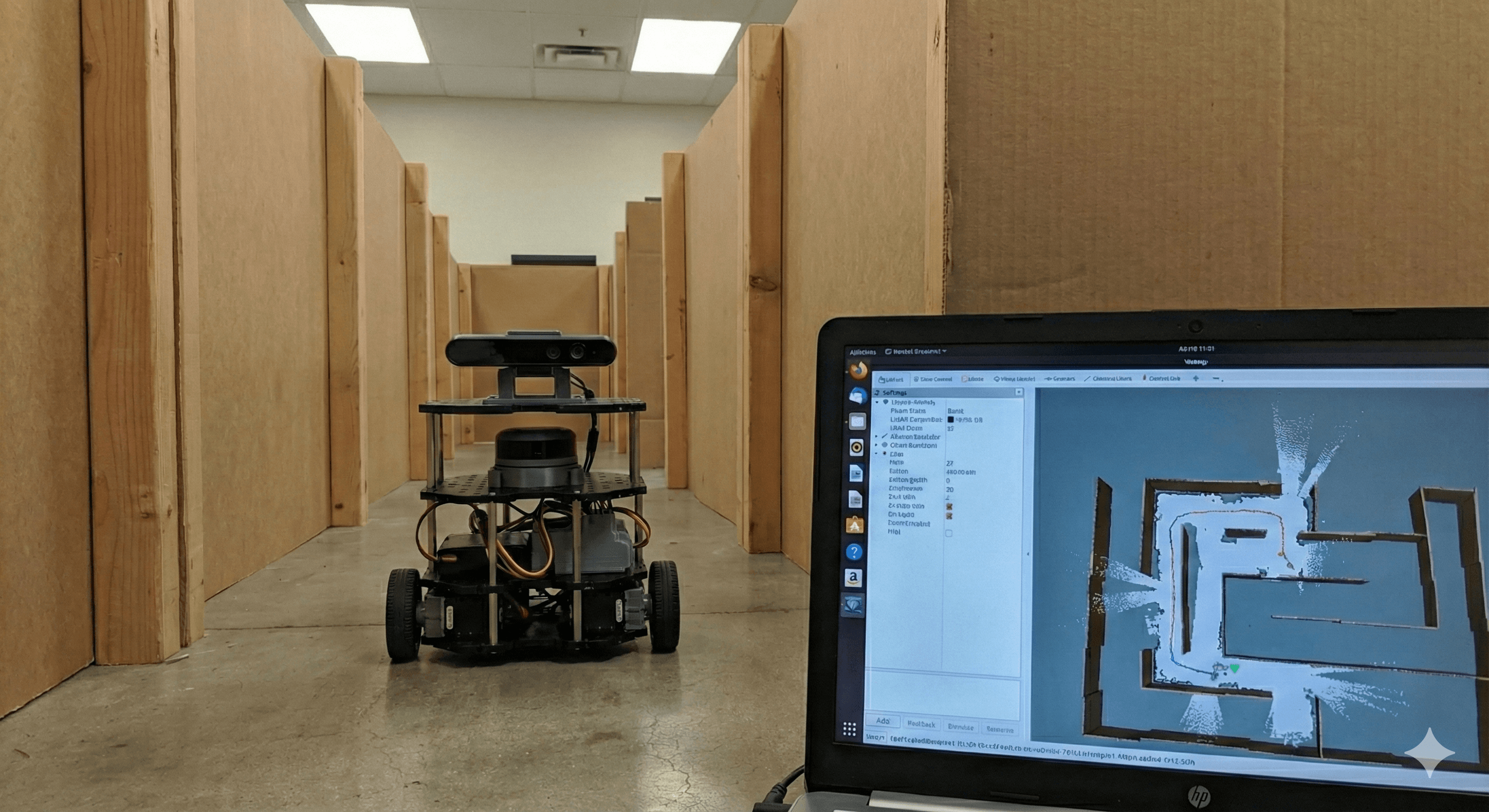
return edges입력된 코드가 아닌, 상황에 따라 변하는 데이터를 바탕으로 로봇이 스스로 경로를 탐색합니다. 미로 탈출, 재난 구조 시뮬레이션 등 복잡한 복합 미션을 수행하며 문제 해결 능력을 극대화합니다.
// C++ Autonomous Navigation
class AutonomousRobot {
void navigate() {
while (!reachedGoal()) {
updateSensors();
planPath();
execute();
}
}
}산업 표준 로봇 운영 체제인 ROS를 통해 휴머노이드 로봇을 제어합니다. 노드 기반 아키텍처, 토픽 통신, 서비스 호출 등 ROS의 핵심 개념을 학습하고, 실제 휴머노이드 로봇을 프로그래밍하여 걷기, 물체 잡기, 대화하기 등 복합적인 작업을 수행합니다.
# ROS Python Example
import rospy
from std_msgs.msg import String
def talker():
pub = rospy.Publisher('chatter', String, queue_size=10)
rospy.init_node('talker', anonymous=True)
rate = rospy.Rate(10)
while not rospy.is_shutdown():
hello_str = "Hello ROS %s" % rospy.get_time()
pub.publish(hello_str)
rate.sleep()제미나이 3를 활용해 코드 오류를 수정하고 완성한 학생 작품입니다.
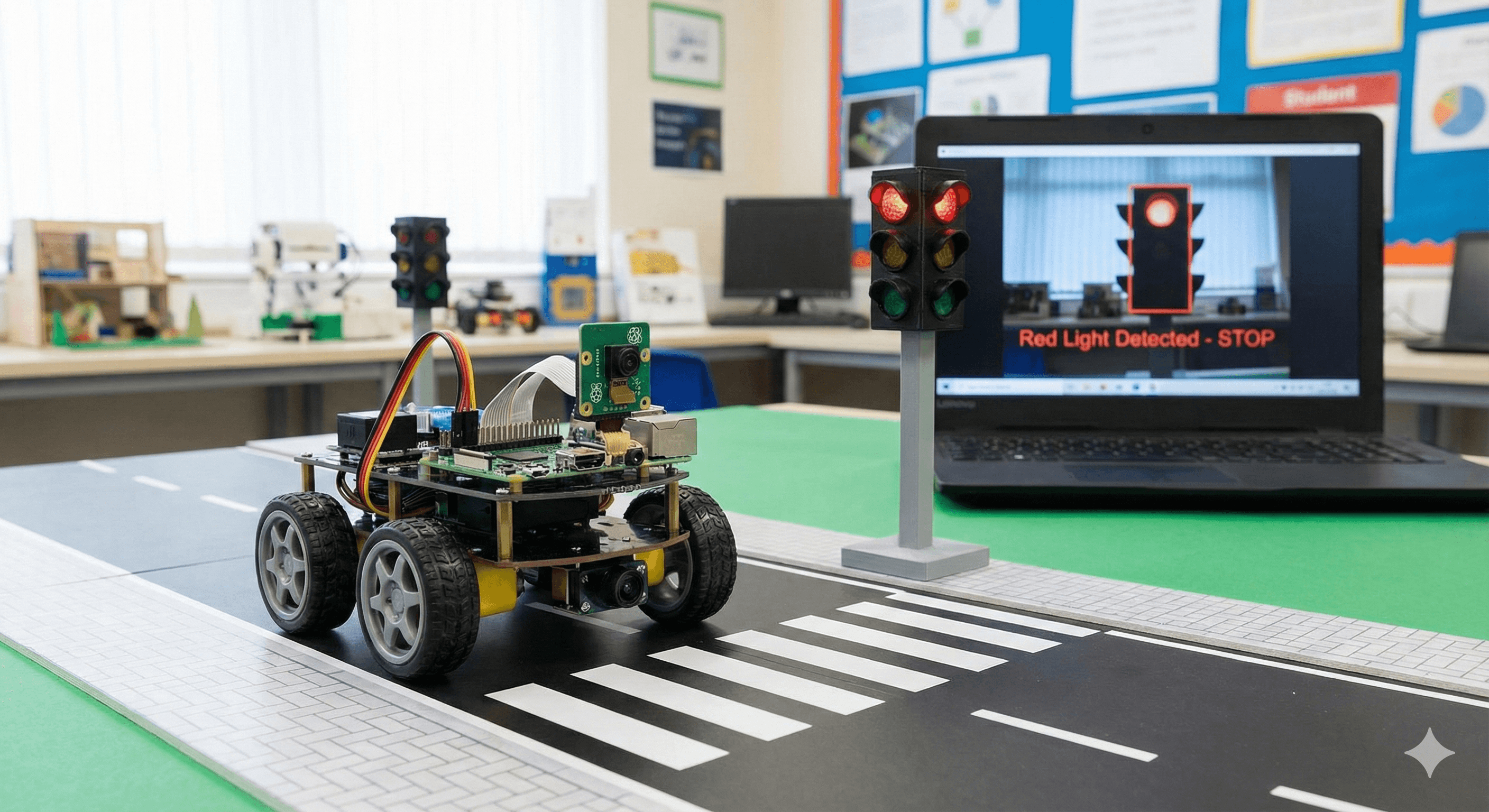
카메라로 신호등을 인식하고 자동으로 멈추는 자동차 로봇
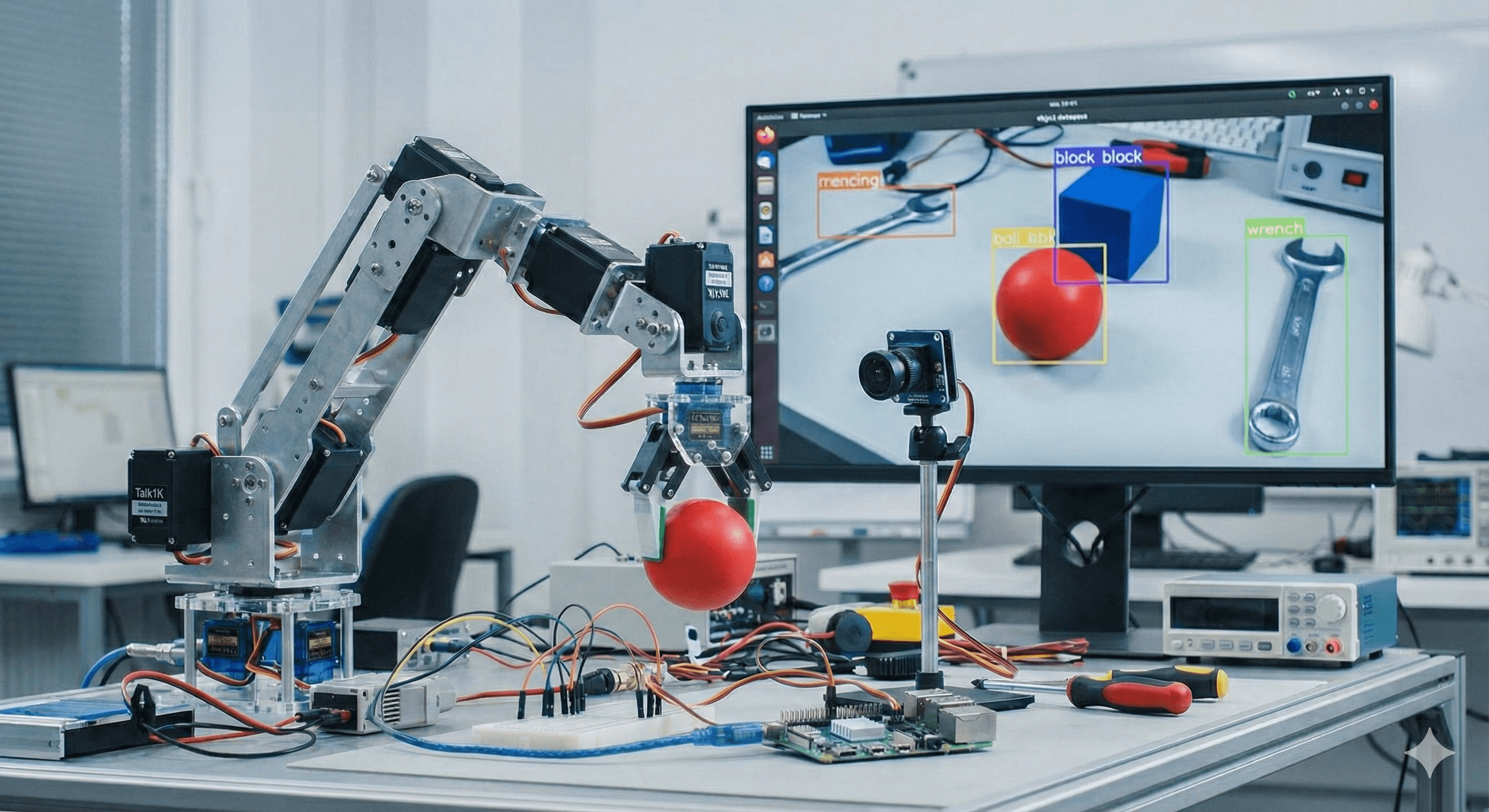
특정 물건을 찾아 집어오는 지능형 로봇 팔 시스템
ROS를 활용한 휴머노이드 로봇 제어 및 복합 작업 수행
Advanced Course는 미래의 AI 엔지니어를 위한 전문 과정입니다.
상담을 통해 여러분의 기술 역량을 확인하고 맞춤형 학습 계획을 세워보세요.